Le L293D est l’un des pilotes moteurs les plus utilisés pour commander des moteurs DC ou pas-à-pas avec un microcontrôleur comme Arduino ou Raspberry Pi. Vous verrez rapidement comment il fonctionne, comment le câbler et quels pièges éviter pour ne pas griller ni le composant, ni votre carte. Cette vue d’ensemble va d’abord répondre clairement à vos questions pratiques, puis détailler les schémas, applications et alternatives possibles.
Fonctionnement du l293d et bases à connaître
Avant de brancher le moindre fil, il est essentiel de comprendre ce que fait réellement le L293D et ses limites. Vous verrez jusqu’à quel courant il peut supporter, comment la double alimentation fonctionne et pourquoi les diodes de roue libre intégrées comptent vraiment. Cela vous permettra de choisir en toute connaissance de cause ce composant pour vos projets de robotique ou de contrôle moteur.
Comment fonctionne un l293d et à quoi sert ce pilote moteur
Le L293D est un circuit intégré de type pont en H quadruple, destiné à piloter deux moteurs DC ou un moteur pas-à-pas bipolaire. Il reçoit des signaux logiques de votre microcontrôleur et les traduit en puissance pour les moteurs. Son principe est simple : en inversant la polarité appliquée aux bornes du moteur via quatre transistors disposés en H, il permet de contrôler le sens de rotation.
L’intérêt principal du composant est d’isoler la partie logique de commande (votre Arduino ou Raspberry Pi) de la partie puissance. Sans ce pont en H, vous risqueriez d’endommager votre carte en branchant directement un moteur qui consomme plusieurs centaines de milliampères. Le L293D assure cette séparation tout en restant compact et facile à intégrer dans vos prototypes.
Comprendre les caractéristiques techniques clés du l293d sans se perdre
Le L293D supporte jusqu’à 600 mA par canal en continu, avec des pointes brèves pouvant atteindre 1,2 A. Cette limite reste modeste comparée à d’autres drivers plus récents. La tension moteur (Vs) peut monter jusqu’à environ 36 V, tandis que la logique (Vss) fonctionne typiquement à 5 V, compatible avec la plupart des microcontrôleurs.
| Caractéristique | Valeur typique |
|---|---|
| Courant par canal (continu) | 600 mA |
| Courant crête | 1,2 A |
| Tension moteur (Vs) | 4,5 V à 36 V |
| Tension logique (Vss) | 5 V |
| Diodes de protection | Intégrées |
Les diodes de roue libre intégrées constituent un atout majeur. Lorsqu’un moteur s’arrête, il génère une tension inverse qui peut détruire les transistors. Ces diodes absorbent cette surtension et protègent le circuit. Attention toutefois : elles ne dispensent pas d’un bon dimensionnement de l’alimentation et d’une gestion thermique adaptée, car le composant chauffe notablement sous charge.
L293d vs L293 et autres drivers : quelles différences pratiques pour vous
Le L293D intègre des diodes de protection, contrairement au L293 classique qui impose de les ajouter en externe. Cette différence simplifie grandement le montage pour les débutants et réduit le risque d’erreur de câblage.
Par rapport au L298N, autre driver populaire, le L293D est plus compact mais offre un courant maximum plus faible et un rendement moins bon. Le L298N peut gérer jusqu’à 2 A par canal, ce qui le rend préférable pour des moteurs plus puissants. Les drivers MOSFET modernes, comme ceux basés sur le TB6612FNG, surpassent les deux en efficacité énergétique et dégagent beaucoup moins de chaleur.
Le choix dépend donc de vos besoins : pour un petit robot éducatif ou un prototype léger, le L293D reste économique et suffisant. Pour des applications plus exigeantes, tournez-vous vers des alternatives plus robustes.
Câblage du l293d avec Arduino et autres microcontrôleurs
Le succès d’un projet avec L293D se joue souvent au moment du câblage et de l’alimentation. Vous verrez comment relier proprement les broches au microcontrôleur, comment séparer la logique de la puissance et quelles erreurs de branchement provoquent le plus de pannes. L’objectif est que vous puissiez reproduire un schéma fiable dès votre prochain montage.
Schéma de brochage du l293d : repérer clairement chaque pin utile
Le L293D se présente en boîtier DIP 16 broches, avec les canaux moteurs répartis de chaque côté. Voici les broches essentielles à connaître :
- EN1 et EN2 (broches 1 et 9) : activent respectivement les ponts 1 et 2. Acceptent un signal PWM pour contrôler la vitesse.
- IN1 à IN4 (broches 2, 7, 10, 15) : reçoivent les signaux logiques de direction depuis le microcontrôleur.
- OUT1 à OUT4 (broches 3, 6, 11, 14) : sorties vers les bornes des moteurs.
- Vss (broche 16) : alimentation logique, typiquement 5 V.
- Vs (broche 8) : alimentation moteur, entre 4,5 V et 36 V.
- GND (broches 4, 5, 12, 13) : masse commune, plusieurs pins pour assurer un bon retour de courant.
Un schéma clair vous évitera bien des déconvenues : repérez toujours le repère en demi-lune sur le boîtier pour orienter correctement le composant.
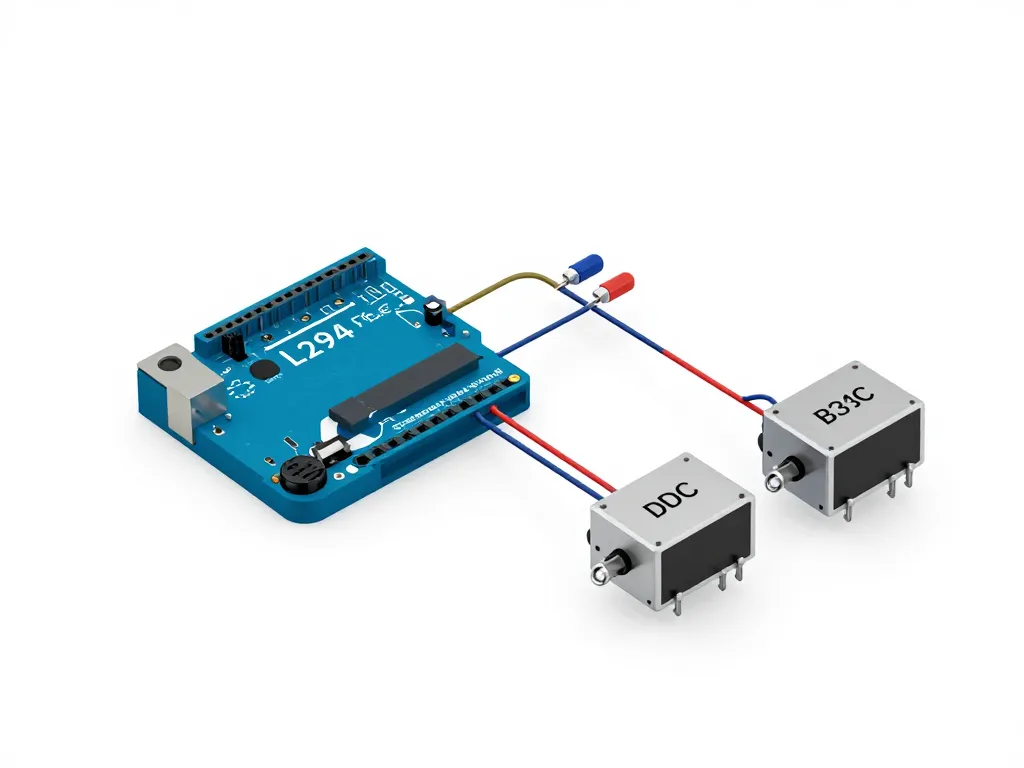
Comment câbler un l293d avec Arduino pour piloter deux moteurs DC
Pour contrôler deux moteurs DC avec un Arduino, suivez ces étapes :
- Reliez IN1, IN2, IN3, IN4 à quatre sorties numériques de l’Arduino (par exemple 2, 3, 4, 5).
- Connectez EN1 et EN2 à deux broches PWM (par exemple 9 et 10) pour gérer la vitesse.
- Branchez Vss à la sortie 5 V de l’Arduino.
- Reliez Vs à votre alimentation moteur dédiée (pile, batterie, bloc secteur).
- Connectez toutes les masses (GND) ensemble : celle de l’Arduino, celle de l’alimentation moteur et celles du L293D.
- Branchez vos moteurs sur OUT1–OUT2 et OUT3–OUT4. Le sens de rotation dépendra de l’ordre des fils.
Ce câblage permet un contrôle indépendant de deux moteurs, idéal pour un robot mobile à deux roues. Vérifiez toujours la polarité de votre alimentation moteur pour éviter d’inverser Vs et GND, ce qui grille instantanément le composant.
Faut-il une alimentation séparée pour le l293d et les moteurs utilisés
Dans la plupart des cas, oui, une alimentation séparée est recommandée. Les moteurs consomment souvent plusieurs centaines de milliampères, voire plus d’un ampère au démarrage. Si vous alimentez tout depuis l’Arduino, vous risquez de surcharger son régulateur 5 V et de provoquer des redémarrages intempestifs ou des comportements erratiques.
La solution est simple : utilisez une batterie ou un bloc secteur dédié pour Vs, tout en gardant le 5 V de l’Arduino pour Vss. La clé est de relier les masses des deux alimentations pour assurer la cohérence des niveaux logiques. Sans cette masse commune, les signaux de commande ne seront pas correctement interprétés.
Cette séparation améliore aussi la stabilité : les appels de courant brusques du moteur ne perturbent plus la partie logique, et vous évitez les parasites électriques qui peuvent corrompre les signaux.
Contrôle de moteurs DC et pas-à-pas avec un l293d

Une fois le câblage maîtrisé, reste à savoir comment exploiter pleinement le L293D pour vos moteurs DC ou pas-à-pas. Vous verrez les logiques de commande de base, des exemples de code Arduino et les limites à respecter pour ne pas faire chauffer le composant. Cette partie rend concret ce que vous pouvez faire dans vos projets de robotique, de domotique ou de prototypage.
Piloter un moteur DC avec un l293d : sens, vitesse et sécurité
Pour un moteur DC, le contrôle du sens de rotation repose sur les entrées IN1 et IN2. En envoyant IN1 à HIGH et IN2 à LOW, le moteur tourne dans un sens. En inversant (IN1 à LOW, IN2 à HIGH), il tourne dans l’autre sens. Si les deux sont à LOW, le moteur est à l’arrêt ; si les deux sont à HIGH, il freine activement.
La vitesse se gère via un signal PWM sur la broche EN correspondante. Par exemple, avec analogWrite(9, 128) sur EN1, vous obtenez environ 50 % de la vitesse maximale. Plus la valeur PWM est élevée (0 à 255), plus le moteur tourne vite.
Côté sécurité, surveillez le courant consommé. Si votre moteur tire plus de 600 mA en continu, le L293D va chauffer rapidement. Ajoutez un condensateur de découplage (100 µF) près de Vs pour absorber les pointes de courant et stabiliser l’alimentation. Un dissipateur thermique peut aussi prolonger la durée de vie du composant sous charge soutenue.
Utiliser un l293d pour contrôler un moteur pas-à-pas bipolaire simplement
Un moteur pas-à-pas bipolaire possède deux bobines qu’il faut alimenter dans un ordre précis pour faire tourner le rotor d’un angle déterminé. Le L293D se prête bien à cette tâche : chaque bobine est reliée à une paire de sorties (OUT1–OUT2 pour la première, OUT3–OUT4 pour la seconde).
Le pilotage consiste à séquencer les signaux sur IN1 à IN4. Une séquence classique en mode plein pas (full step) peut ressembler à ceci :
| Étape | IN1 | IN2 | IN3 | IN4 |
|---|---|---|---|---|
| 1 | HIGH | LOW | LOW | LOW |
| 2 | LOW | HIGH | LOW | LOW |
| 3 | LOW | LOW | HIGH | LOW |
| 4 | LOW | LOW | LOW | HIGH |
En répétant cette séquence, le moteur effectue un tour complet en autant de pas que le constructeur le spécifie (souvent 200 pas pour 1,8° par pas). Des bibliothèques Arduino comme Stepper.h simplifient grandement cette gestion en générant automatiquement les séquences et en permettant de régler la vitesse.
Exemple de code Arduino avec l293d pour démarrer rapidement vos tests
Voici un code minimal pour faire tourner un moteur DC dans les deux sens avec un L293D :
Configuration :
- IN1 sur la pin 2
- IN2 sur la pin 3
- EN1 sur la pin 9 (PWM)
Le code définit les broches en sortie, puis active le moteur à 70 % de vitesse dans un sens pendant 2 secondes, s’arrête 1 seconde, puis tourne dans l’autre sens. Vous pouvez encapsuler ces commandes dans des fonctions comme avancer(), reculer() ou tourner() pour rendre votre programme plus lisible.
En phase de test, affichez dans le moniteur série les ordres envoyés. Cela facilite le débogage si le moteur ne réagit pas comme prévu. Vérifiez aussi que les connexions sont bien serrées et que l’alimentation délivre la tension attendue.
Limites, alternatives au l293d et bonnes pratiques de choix
Le L293D reste très répandu, mais ce n’est pas toujours le meilleur choix selon votre moteur, votre tension et votre besoin en rendement. Vous verrez où se situent ses principales limites, quelles alternatives modernes existent et comment sélectionner le bon pilote moteur pour vos projets. Quelques bonnes pratiques vous aideront aussi à prolonger la durée de vie de vos composants.
Quelles sont les principales limites du l293d en courant et en rendement
Le L293D génère des pertes notables sous forme de chaleur, surtout lorsqu’on approche la limite de 600 mA par canal. La chute de tension entre Vs et la sortie moteur peut atteindre 2 à 3 V, ce qui réduit la tension réellement appliquée au moteur et diminue le couple disponible. Ce rendement médiocre est dû à l’utilisation de transistors bipolaires plutôt que de MOSFET.
Au-delà d’une charge soutenue, le boîtier peut devenir très chaud au toucher, signalant un risque de destruction si la dissipation thermique n’est pas assurée. Pour des moteurs tirant plus de 500 mA en continu, il devient préférable de se tourner vers des drivers plus efficaces.
Quelles alternatives au l293d privilégier pour des moteurs plus puissants
Pour des applications plus exigeantes, plusieurs alternatives s’offrent à vous :
- L298N : supporte jusqu’à 2 A par canal, largement utilisé en robotique. Module compact, mais rendement encore moyen.
- TB6612FNG : basé sur MOSFET, il offre jusqu’à 1,2 A par canal avec un bien meilleur rendement et moins de chaleur dégagée.
- Drivers MOSFET dédiés : des modules pont en H à MOSFET peuvent gérer plusieurs ampères avec des pertes minimales, idéaux pour des moteurs gourmands.
- DRV8833 ou DRV8871 : circuits intégrés récents de Texas Instruments, compacts et performants, avec protections intégrées.
Ces composants intègrent souvent des protections contre les surintensités, les surtensions et les surchauffes, renforçant la robustesse de vos montages. Ils coûtent légèrement plus cher, mais vous gagnez en fiabilité et en longévité.
Comment choisir entre l293d, L298N ou drivers MOSFET selon votre projet
Le choix se fait en croisant plusieurs critères :
| Critère | L293D | L298N | Driver MOSFET |
|---|---|---|---|
| Courant par canal | 600 mA | 2 A | 1 à 5 A+ |
| Rendement | Moyen | Moyen | Excellent |
| Dégagement thermique | Élevé | Élevé | Faible |
| Compacité | Très bonne | Moyenne | Bonne |
| Coût | Faible | Faible | Moyen |
Pour un robot éducatif léger, un projet scolaire ou un prototype simple avec des moteurs consommant moins de 500 mA, le L293D reste un choix économique et facile à mettre en œuvre. Pour des applications plus sérieuses, comme un robot mobile autonome, une imprimante 3D ou un bras articulé, préférez un L298N ou un driver MOSFET pour garantir stabilité et durabilité.
En définitive, le L293D conserve sa place dans la boîte à outils du maker pour les projets d’initiation, mais connaître ses limites et ses alternatives vous permet de faire le bon choix dès le départ et d’éviter les déceptions liées à une surchauffe ou un manque de puissance.